-

-
常州(zhou)瑞基閥(fa)門(men)科技有限公(gong)司
changzhou ruiji valve technology co., ltd.

聯系(xi)電話:
changzhou ruiji valve technology co., ltd.
聯系(xi)電話:

products
産品(pin)的性(xing)能符合gb3836.1-2010爆(bao)炸性環境第1部(bu)分:設(she)備 通用要(yao)求、gb3836.2-2010 爆炸性(xing)環境(jing)第2部分:由(you)隔爆(bao)外殼“d”保護(hu)的設備、gb3836.4-2010爆炸(zha)性環境第4部(bu)分:由本質(zhi)安全型“i”保護的(de)設備》及jb/t8529-1997《隔爆型閥門電動裝置技術(shu)條件》gbt28270-2012《智能(neng)型閥(fa)門電動裝(zhuang)置》的規定(ding),可廣(guang)泛應(ying)用于煤礦(kuang)井上、井下的管(guan)道閥控系統中(zhong)。
b) 電纜引(yin)入裝(zhuang)置型(xing)式爲壓(ya)緊螺母及壓盤式。
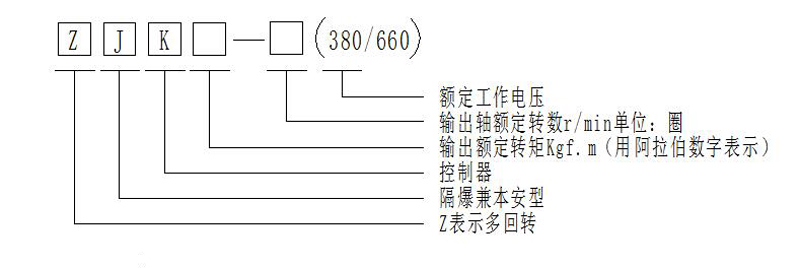
◆型号(hao)示例:
zjk45/24(660):表示多回(hui)轉、隔爆兼本安(an)型、輸(shu)出轉矩450n•m(45kgf•m)、輸(shu)出轉速(su)24 r/min,額定工作(zuo)電(dian)壓爲660或380v的(de)電動裝置(zhi)。
4、使用(yong)環境(jing)主要技術參數
4.1 使用環境:
a) 環境(jing)氣壓:86kpa~110kpa;
b) 環境(jing)溫(wen)度(du):-10℃~+40℃;
c) 空氣(qi)平均相對濕度:不(bu)大于95%(+25℃);
d) 煤礦井(jing)下有(you)瓦斯,煤塵等爆(bao)炸危險(xian)的(de)環境(jing);無垂直淋水和(he)濺水場合;
e)無(wu)強烈震動和沖擊(ji)的地方(fang);
f) 無(wu)破壞(huai)金屬(shu)和絕緣材(cai)料的腐(fu)蝕(shi)性氣(qi)體的地方(fang)。
4.2 技術(shu)參數
a)額(e)定工作(zuo)電壓(ya):ac660v或ac380v
b)額定工作頻率:50hz
c)開關量輸(shu)入信(xin)号電平(ping):本安dc24v 本安
d)輸入(ru)信号電流(liu)、阻抗(kang):電流dc 4ma~20ma ib 輸(shu)入阻抗(kang)250Ω
e)輸出信(xin)号電流(liu)、負(fu)載:電流(liu)dc 4ma~20ma ib 負載(zai)阻抗(kang)<700Ω
f)485通(tong)訊接口(kou)
g)工作(zuo)制:短時10分鍾工作制
h)安裝(zhuang)方式:垂直或水(shui)平安(an)裝方式。
4.3 zjk系(xi)列型号列表(biao)見(jian)(表1)

4.4結(jie)構及外形
4.4.1結構如(ru)(圖1)所示(shi)
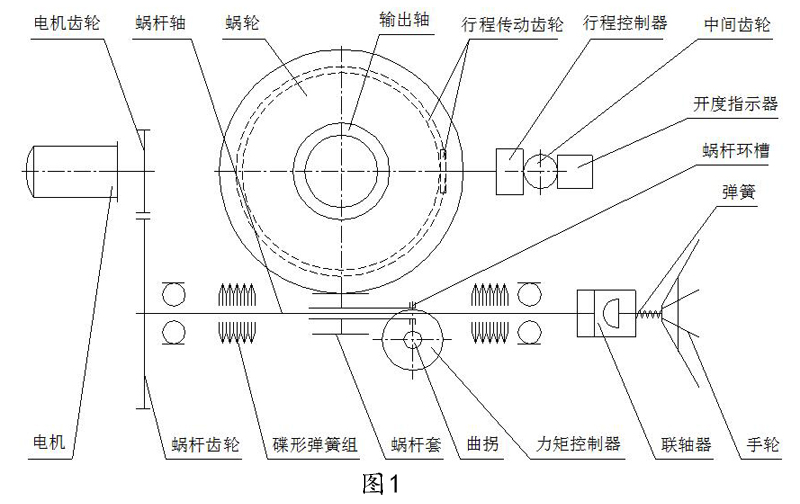
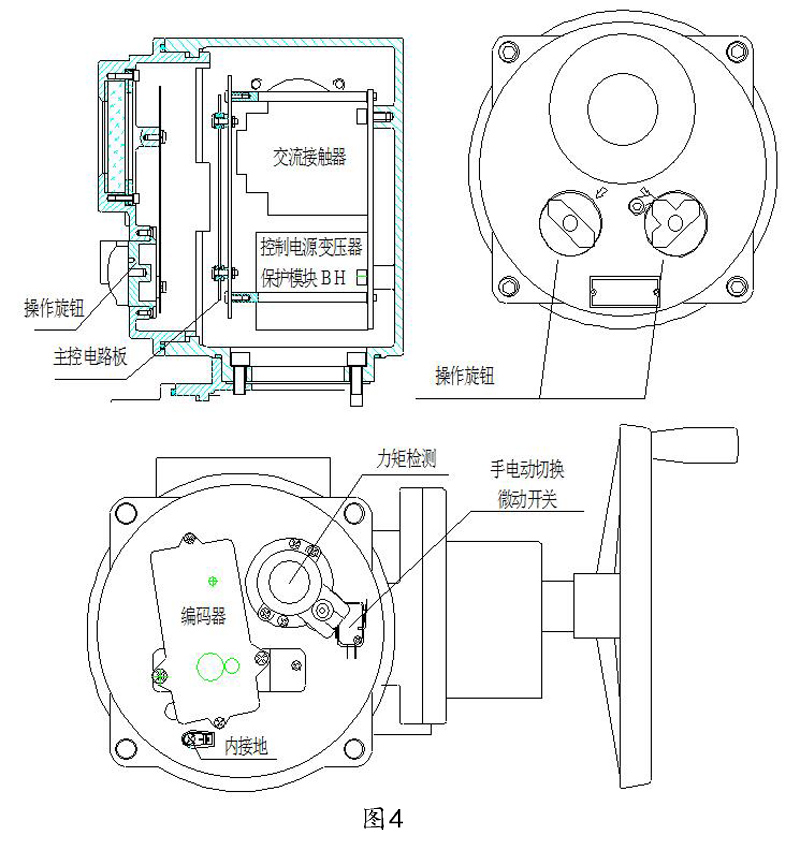
電動裝置由閥(fa)門專用電(dian)動機(ji)、減速(su)機構、碟簧(huang)、轉矩檢測(ce)控制(zhi)機構、行(hang)程檢測(ce)控制機構(gou)、控制(zhi)器(qi)、面(mian)闆操作、手(shou)電動切換(huan)機構(gou)、手動操作(zuo)機構(gou)、開蓋機電(dian)連鎖(suo)裝置等組成。
4.4.1.1電動機(ji):采用ybdf系列閥門專(zhuan)用電機(ji)系列(lie)。
4.4.1.2力矩(ju)檢測(ce)裝置
當力矩控(kong)制器(qi)接收到蝸(wo)杆的軸向力後(hou),推動力(li)矩控制(zhi)器軸旋轉(zhuan)、帶動(dong)位移傳(chuan)感器檢
測力(li)矩輸出值(zhi),送(song)入控制(zhi)器進(jin)行數據處理(li)。
4.4.1.3行(hang)程控(kong)制器(qi)
行程(cheng)控制器(qi)采用編(bian)碼器檢測輸出(chu)軸的(de)旋轉角度(du)與位移,将(jiang)所采集的(de)數(shu)據(ju)送入(ru)到控制(zhi)器進行處理(li),用以控制(zhi)檢(jian)測輸出軸、對輸出(chu)軸進行^的定位。
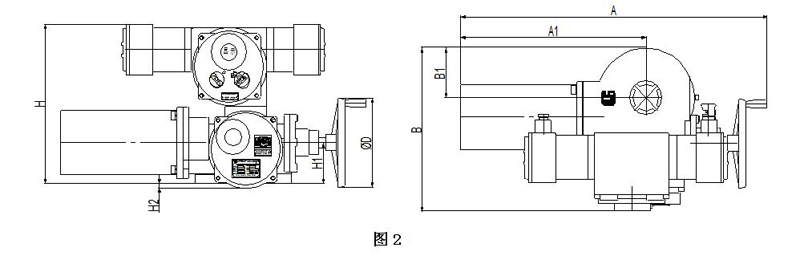
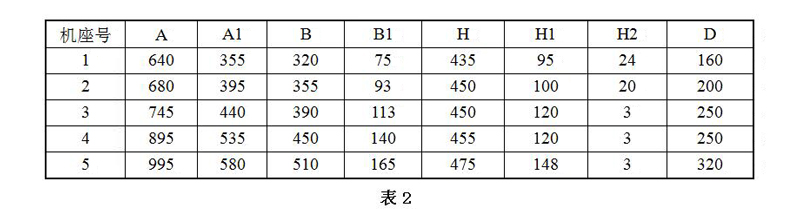
4.4.2外(wai)形尺寸(cun)見(表2)(圖(tu)2)
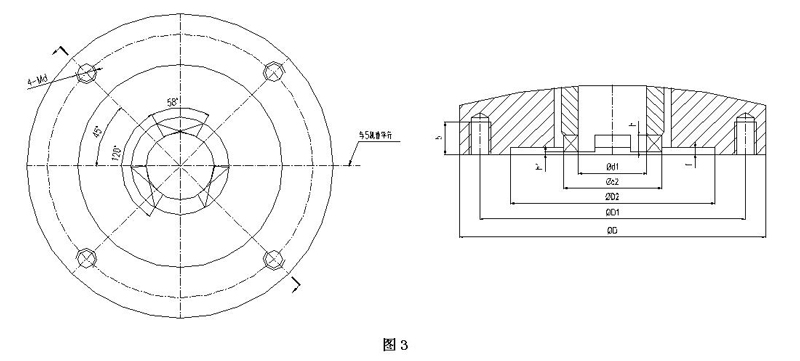
4.4.3外部連(lian)接尺寸見(jian)(表3)(圖(tu)3)

4.4.3電氣元件安裝(zhuang)位置如圖(tu)所示(shi)、見(圖4)
4.5控制器電(dian)控保護及(ji)性能(neng)參數
4.5.1電流保護(hu):電動裝(zhuang)置(zhi)電動(dong)機運(yun)行電流大(da)于額定(ding)電(dian)流,小(xiao)于電動機(ji)額定(ding)電流的5倍,2秒内斷開(kai)電動機驅(qu)動電(dian)源并(bing)顯(xian)示(shi)故障報警。
4.5.2欠壓(ya)保護:當(dang)三相交流電(dian)源電(dian)壓降至(zhi)額定電(dian)壓的(de)85%以下時(shi),模(mo)塊(kuai)實(shi)現保護(hu),停(ting)止控制輸出(chu),實現對(dui)控制(zhi)對象(xiang)的保(bao)護。當(dang)三相交流(liu)電源電壓(ya)恢複(fu)到額定電(dian)壓的(de)85%以上(shang)時,模(mo)塊退出保護(hu),電路正(zheng)常工作。
4.5.3短(duan)路保(bao)護:電動(dong)裝置(zhi)電(dian)動機(ji)驅動(dong)側驅動電(dian)流大(da)于電(dian)動機額(e)定電流的10倍,0.2秒内(nei)斷開(kai)電動機(ji)驅動電(dian)源,并顯(xian)示故障(zhang)報警。
4.5.4過力矩保(bao)護:當(dang)電動執行(hang)器向開向(xiang)或關(guan)向運行出現卡(ka)澀故障時(shi),将信号送(song)進(jin)控制箱(xiang)模塊(kuai)(開關量信号)中,模(mo)塊(kuai)實現(xian)單方向保護,實(shi)現單方(fang)向鎖定(ding),解鎖時需向相(xiang)反方向運行3s,即(ji)可實現解(jie)鎖或停電解鎖;當(dang)出(chu)現開閥、關閥兩(liang)個方向卡澀故(gu)障時,雙方向運(yun)行均能保護,模(mo)塊實現雙方向(xiang)保護,并(bing)應停電(dian)解鎖。
4.5.5相(xiang)序保護(hu):當輸(shu)入電源三(san)相交流電中有(you)一相(xiang)或兩相電(dian)壓爲(wei)零時,控制(zhi)模塊實現保護(hu),停止控制輸出,實現被控對象(xiang)的保護(hu),并顯示故障(zhang)報警。
4.5.6漏電保護:當(dang)主電路(lu)對地(di)絕緣值小于下表(biao)4時(shi)、實現(xian)漏電(dian)保護,當主電路對地絕緣當上升到下表(biao)值的1.5倍時(shi),解除主電路漏電保(bao)護,電路恢複正(zheng)常工作。

4.5.7相(xiang)序自(zi)糾正:控制器依(yi)據檢(jian)測到的電(dian)源(yuan)相(xiang)序自動糾(jiu)正輸(shu)出相序,保(bao)證電(dian)動機的旋轉方向(xiang)與(yu)開、關(guan)閥的(de)方向保持(chi)一緻,消除了由(you)于電(dian)動(dong)機方(fang)向不對造成對閥(fa)門的(de)損壞。
4.5.8手電(dian)動切(qie)換保護:電(dian)動裝置手動、電(dian)動切(qie)換有(you)機電連鎖機構(gou),靈敏可靠,電(dian)動時手輪不(bu)得(de)轉動,手動時應能可靠(kao)切斷操作電源(yuan)、确保電動不能(neng)工作。
4.6工(gong)作(zuo)原理(li)及工(gong)作特性
zjk系(xi)列電動裝(zhuang)置采(cai)用隔(ge)爆外(wai)殼,把(ba)可能(neng)因産(chan)生火(huo)花、電弧的電路部分與(yu)殼體外(wai)爆(bao)炸(zha)性(xing)氣體混(hun)合物隔開,從而(er)達到隔爆(bao)的目(mu)的。隔爆接合面(mian)參數符(fu)合gb3836.2-2010的規(gui)定(ding),電纜引(yin)入裝(zhuang)置符合(he)gb3836.1-2010的規定(ding)。
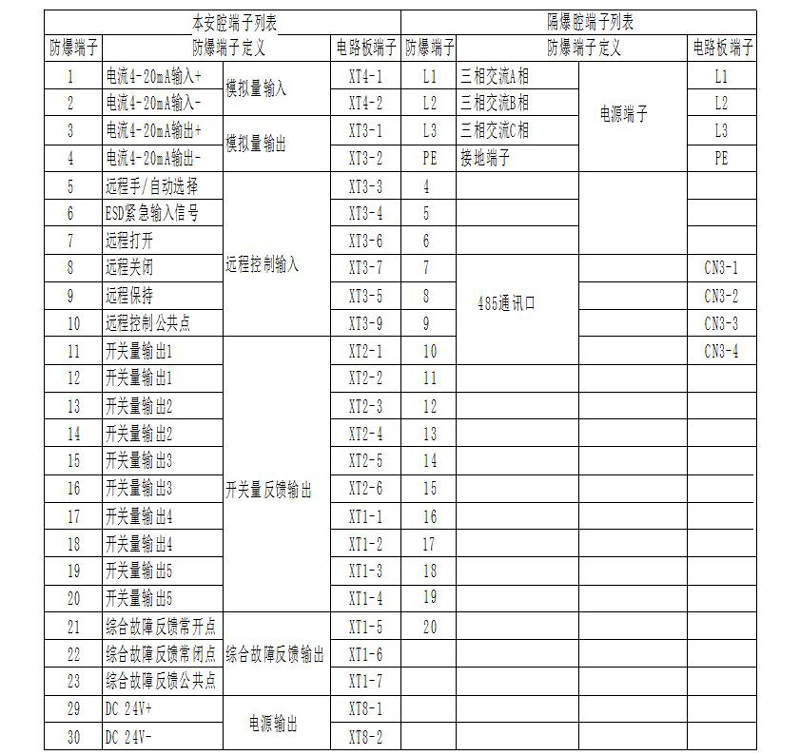
4.7電動裝(zhuang)置(zhi)接線(xian)原理圖(tu)見(圖5)、出(chu)線端(duan)子圖見(圖6)
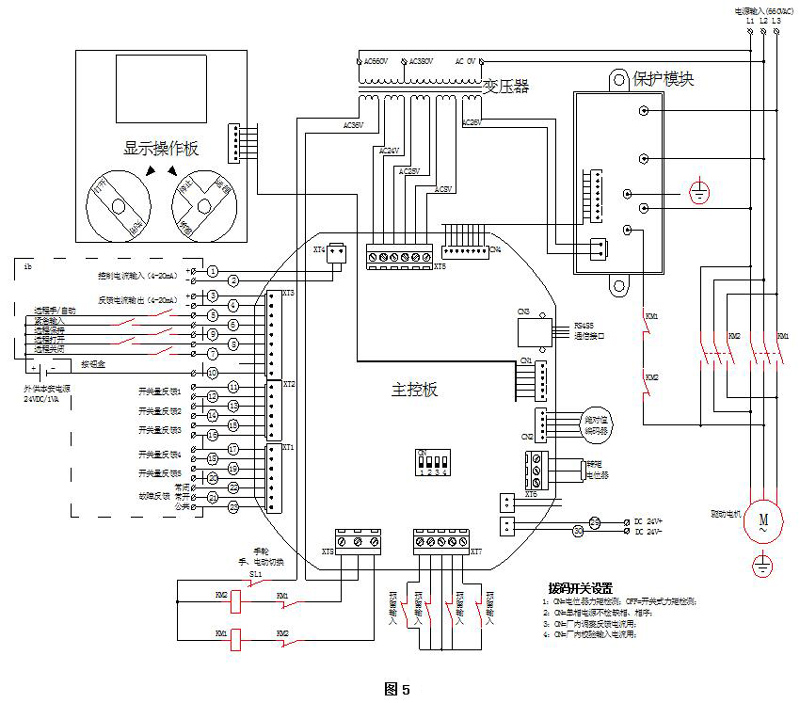
4.7.1.3主控闆:主控(kong)闆安裝在機(ji)身(shen)内,内置微(wei)處理(li)器,實現電動執行器智能(neng)控制(zhi)。主控闆主(zhu)要功能包括:控制電(dian)源處(chu)理(li);模拟信(xin)号輸(shu)入(ru)檢測;模(mo)拟信号輸出控(kong)制;開(kai)關信号輸(shu)入檢測(ce);開關控(kong)制信(xin)号(hao)輸(shu)出;與面闆通(tong)信(xin)處理(li)等。
4.7.1.4電(dian)源模塊:電源模(mo)塊包(bao)含相(xiang)序識(shi)别電(dian)路;漏(lou)電檢測電路;電壓、電流(liu)檢測電(dian)路等。通過8芯連(lian)接(jie)線與主控闆(pan)連接。
4.7.1.5^值編碼(ma)器(qi):編碼(ma)器(qi)與(yu)執行(hang)器中(zhong)轉連(lian)接,用于檢(jian)測閥門當(dang)前開度。編(bian)碼器(qi)爲16位精度,ssi接口(kou)輸出位(wei)置信息(xi)。
4.7.1.6轉矩(ju)檢(jian)測電位(wei)器:用于檢測電(dian)動裝置的開向(xiang)、關向輸出(chu)轉矩(ju),作爲(wei)控制(zhi)器轉(zhuan)矩控(kong)制(zhi)模拟量(liang)輸入。
4.7.1.7開關信号(hao)反饋: 反饋6組繼(ji)電器(qi)開關信号。其中1路爲(wei)故障狀态,其餘(yu)5路可(ke)通過(guo)菜(cai)單(dan)人工編程設置。
4.7.1.8各路(lu)信号隔離:本安電路輸入、輸出(chu),采用專用隔離(li)模塊,可承受2000v浪(lang)湧電壓。
4.7.1.9驅動信(xin)号輸出:無源幹(gan)接點(dian)輸出。
4.7.1.10全中(zhong)文lcd顯示(shi):漢(han)字菜(cai)單顯示,方(fang)便用(yong)戶觀察狀态及(ji)操作(zuo)。
4.7.1.11故障自診(zhen)斷功能:系統帶(dai)有故障(zhang)自診斷功能,能即時監(jian)測故障、執行保護措施并在面(mian)闆上直觀(guan)的顯(xian)示當(dang)前故(gu)障信(xin)息。主(zhu)要包括以(yi)下故障及保護(hu)類型。
a)手輪手動:控制器設有手(shou)輪操作輸(shu)入檢(jian)測,該(gai)信号爲常(chang)閉信(xin)号。當執行器切換到手輪(lun)手動時,信(xin)号斷(duan)開,控制器禁止(zhi)動作,并在(zai)故障(zhang)診(zhen)斷顯示區顯(xian)示“手(shou)輪手動”字(zi)樣;當手輪(lun)操作(zuo)輸入信号重新(xin)閉合(he)時,手輪手動狀态可自動解除(chu)。
b)緊(jin)急狀态(tai):當遠程緊(jin)急esd信(xin)号閉(bi)合(he)時(shi),故障(zhang)診斷顯示區顯(xian)示“緊(jin)急狀态”字(zi)樣,此時根據内(nei)部設置,可禁止(zhi)執行(hang)器(qi)動作,或者無(wu)條件把執(zhi)行(hang)器調整到内部設定的安全位置(zhi);當(dang)遠(yuan)程緊急esd信(xin)号斷開時(shi),緊急狀态自動(dong)解除(chu)。
c)電機漏電(dian):電源模塊在電(dian)機不(bu)工作時,檢(jian)測電機繞組帶(dai)電部(bu)分(fen)和外殼的(de)絕緣電阻值(zhi),當檢(jian)測到該(gai)值(zhi)小于一定(ding)範圍,發出“電(dian)機(ji)漏電(dian)”報警,禁(jin)止輸出。
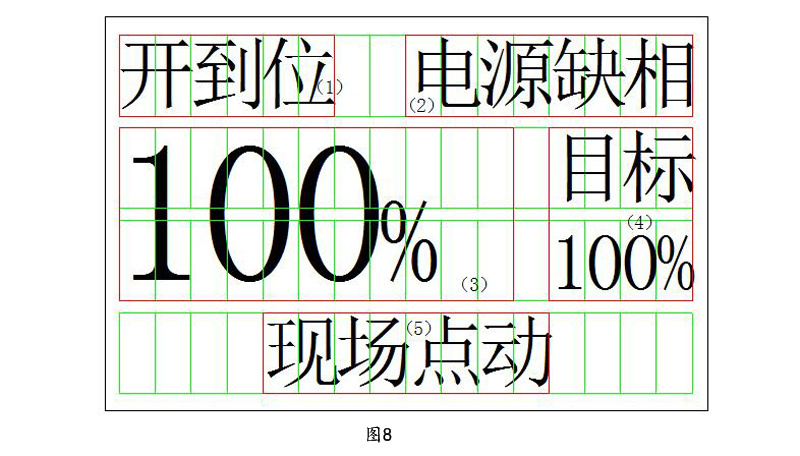
d)電源(yuan)缺相:系統(tong)檢測三(san)相電源(yuan)輸入,當發生缺(que)相時(shi)爲(wei)保護電機,禁止執行器(qi)動作,并顯示“電源缺相(xiang)”字樣;電源缺相(xiang)一(yi)旦發(fa)生不(bu)能自動解(jie)除,除(chu)非斷電再重(zhong)新(xin)通電。
e)熱過(guo)載:控制器(qi)設有(you)電機(ji)熱過(guo)載開(kai)關輸入檢測,該(gai)信号(hao)爲常(chang)閉信(xin)号(hao)。當檢測到該(gai)信号(hao)斷開時,故(gu)障診斷(duan)顯(xian)示區(qu)顯示“熱過載”字(zi)樣,并(bing)禁止執行(hang)器動(dong)作(esd緊急狀(zhuang)态除外);熱過(guo)載保護(hu)可(ke)自動恢(hui)複。
f)開力矩:控制(zhi)器設(she)有開向過(guo)力矩檢測(根據(ju)機型可選擇電(dian)位器力矩傳感(gan)器或(huo)常(chang)閉(bi)開關(guan)信号(hao)),當發(fa)生開(kai)力矩(ju)時,禁止執(zhi)行器開(kai),并(bing)顯示(shi)“開力(li)矩(ju)”字樣。在(zai)電機剛(gang)啓動1秒(miao)内不執(zhi)行開向(xiang)過力矩保(bao)護;發生開(kai)向過力矩(ju)保護時(shi)可(ke)自動(dong)恢複,恢(hui)複(fu)的條(tiao)件是(shi):開力(li)矩輸(shu)入恢(hui)複,并且執(zhi)行器執(zhi)行(hang)了(le)關動作(zuo)。
g)關力(li)矩:控(kong)制器設有(you)關向(xiang)過力矩檢測(根(gen)據機型可(ke)選擇電位器力矩傳(chuan)感器或(huo)常(chang)閉開關信(xin)号(hao)),當發生(sheng)關力(li)矩時,禁止執行器關(guan),并顯(xian)示“關(guan)力矩”字樣(yang)。在電機剛(gang)啓動(dong)1秒内不(bu)執(zhi)行關(guan)向過力矩保護(hu);發生(sheng)關向(xiang)過力(li)矩保(bao)護時可自動恢複,恢(hui)複的(de)條件是:關力矩輸入恢複(fu),并且執(zhi)行器執(zhi)行了(le)開動(dong)作。
h)閥位故障:當控制器檢(jian)測不到正(zheng)确的編碼(ma)器或開度(du)電位器(qi)信号時(shi),報閥位故障。此(ci)時禁止執行器動作,并(bing)故障診(zhen)斷顯示(shi)區顯示(shi)“閥位(wei)故障”字樣(yang),閥位故障可自(zi)動恢(hui)複。
4.7.2電動裝(zhuang)置顯示、操作
4.7.2.1顯(xian)示
4.7.2.1.1lcd液晶屏(ping)劃分(fen)爲5個顯示(shi)區域(yu)(如圖8):
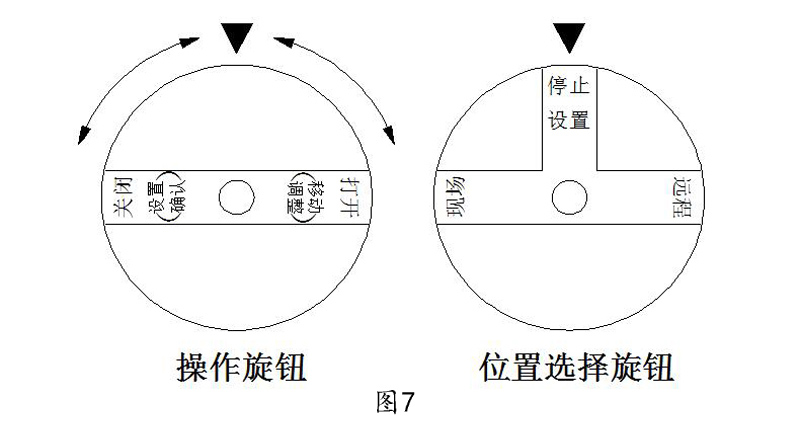
● 現(xian)場點動(位置選擇旋鈕(niu)放在現場位(wei)置(zhi),選(xuan)定現場控(kong)制(zhi)方(fang)式爲點動)。
● 停止(位置(zhi)選擇(ze)旋(xuan)鈕(niu)放在(zai)停止位置)。
● 現場點動(dong)(位(wei)置(zhi)選擇(ze)旋鈕(niu)放在(zai)現場位置,選定現場控制方(fang)式爲點動)。
● 現(xian)場保持(位(wei)置選擇(ze)旋鈕放(fang)在現(xian)場(chang)位置,選(xuan)定現(xian)場控(kong)制方(fang)式爲自保(bao)持)。
● 遠(yuan)程通(tong)信(位置選(xuan)擇旋鈕放(fang)在遠(yuan)程位置(zhi),通信總(zong)線成(cheng)功建立連(lian)接關系)。
● 遠程模(mo)拟(位置選擇旋(xuan)鈕放在遠(yuan)程位(wei)置,遠程手自動(dong)信号閉合(he))。
● 遠程(cheng)點動(位置選擇(ze)旋鈕放在(zai)遠程(cheng)位置,遠程(cheng)手自動信号(hao)斷(duan)開,且(qie)選定(ding)遠程控制(zhi)方式爲(wei)點(dian)動)。
● 遠(yuan)程雙(shuang)位(wei)(位置選(xuan)擇旋鈕放在遠程位置(zhi),遠(yuan)程手(shou)自動(dong)信(xin)号斷開,且選(xuan)定遠(yuan)程控(kong)制方式爲有信(xin)開無信關或有(you)信關無信開)。
● 遠(yuan)程保持(位置選(xuan)擇旋鈕(niu)放在遠(yuan)程位(wei)置,遠(yuan)程(cheng)手(shou)自動信(xin)号斷開,且選定遠程控(kong)制方式(shi)爲(wei)自保(bao)持)。
● 電動裝(zhuang)置安(an)裝調試完成後,可通(tong)過旋鈕組件進行(hang)常規操(cao)作和控(kong)制。
4.7.2.2操作(zuo)
4.7.2.2.1電動裝置操作(zuo)面位置選擇旋(xuan)鈕、操作旋鈕組(zu)件見(如(ru)圖7)。
4.7.2.2.2現場操作(zuo)
4.7.2.2.2.1将位置選(xuan)擇旋鈕旋轉到(dao)現場位置,此時(shi)lcd液晶屏顯(xian)示現(xian)場點動(dong)或(huo)現場(chang)保持模式(現場點動或(huo)保持模式可在組(zu)态參(can)數設定(ding)時(shi)設定其一)。
4.7.2.2.2.2現(xian)場點動(dong)操作:
将操作旋(xuan)鈕旋(xuan)到“關(guan)閉”位(wei)置,并保(bao)持(chi)不動(dong),此時電動裝置(zhi)向關(guan)閉(bi)方(fang)向運動。一(yi)旦放開旋鈕,旋鈕(niu)會自動(dong)回到原始位(wei)置,執行器停止動(dong)作。
将操(cao)作旋鈕(niu)旋到“打開(kai)”位置,并保(bao)持不動,此(ci)時電動(dong)裝置向(xiang)打開方向(xiang)運動(dong)。一旦放開(kai)旋鈕(niu),旋鈕會自(zi)動回(hui)到原始位(wei)置,執(zhi)行器停止動作。
4.7.2.2.2.3現場(chang)保持(chi)操作(zuo):
将操作旋(xuan)鈕旋(xuan)到“關閉”位置,此時電動裝置向(xiang)關閉方向運動(dong)。然後(hou)放(fang)開(kai)旋鈕(niu),旋鈕(niu)會(hui)自動回到原始(shi)位置,但電動裝置(zhi)向關(guan)閉方(fang)向的運動(dong)仍會繼續進行(hang),直到(dao)停止動作的條(tiao)件滿足(如(ru)過力矩、到達關(guan)限位等)。
将(jiang)操(cao)作旋鈕旋到“打開(kai)”位置,此(ci)時(shi)電動(dong)裝置(zhi)向打開方(fang)向運動。然(ran)後放(fang)開旋鈕,旋鈕會(hui)自動回到(dao)原始位置,電(dian)動裝置(zhi)向打(da)開方(fang)向的運動會繼續進(jin)行,直到(dao)停止動作的條件滿足(zu)(如過(guo)力矩、到達開限(xian)位等)。
4.7.2.2.2.4遠程模拟操(cao)作(zuo)(調節(jie)型):
将位置(zhi)選擇(ze)旋鈕旋(xuan)轉(zhuan)到遠(yuan)程位(wei)置(zhi)。lcd液晶屏(ping)顯示(shi)遠程模拟(ni)控制模式。
在遠(yuan)程模拟模(mo)式下(xia),系統接(jie)收(shou)遠程(cheng)輸入的(de)模拟信号(4~20ma)作爲(wei)目标開(kai)度。根據當(dang)前開(kai)度和目标開度(du)的差值自動将電動(dong)裝(zhuang)置調整到目(mu)标位置。
★當檢測到(dao)的模拟(ni)信号丢失時(小于3ma),顯(xian)示丢信,并執行丢信(xin)處理。丢信狀态下的(de)處理方式(shi)可在(zai)組态參數設定(ding)時選(xuan)定。
4.7.2.2.2.5遠(yuan)程開(kai)關操作(開關型(xing)):
将位(wei)置(zhi)選擇旋(xuan)鈕旋(xuan)轉到遠程(cheng)位置。若遠程模拟控(kong)制屏蔽或(huo)遠程模拟信号(hao)爲丢(diu)信狀态,遠(yuan)程(cheng)開關控制有效。lcd液晶屏顯示(shi)遠程點動(dong)、遠程(cheng)保持(chi)或(huo)遠(yuan)程雙(shuang)位模(mo)式(shi)(具體由組(zu)态參數設定(ding)時選定)。
a)遠程點動操作:選(xuan)擇遠(yuan)程點動時(shi),遠程打開和(he)遠程關(guan)閉(bi)信号(hao)有(you)效。
遠(yuan)程關閉信号閉(bi)合,電(dian)動裝(zhuang)置向關閉(bi)方向運動(dong)。一旦(dan)遠程(cheng)關閉(bi)信号斷開,電動(dong)裝置(zhi)立即(ji)停止(zhi)動作。
遠程打開(kai)信号閉合,電動(dong)裝置(zhi)向(xiang)打(da)開方(fang)向運動。一(yi)旦遠(yuan)程打(da)開信号斷開,電動裝置立即停(ting)止動作。
b)遠(yuan)程保持(chi)操(cao)作:選(xuan)擇遠(yuan)程(cheng)自保持(chi)操作時(shi),遠(yuan)程打(da)開、遠(yuan)程關(guan)閉和(he)遠程保持(chi)信号(hao)有效(xiao)。
遠程關閉(bi)信号(hao)閉(bi)合(he),電動(dong)裝置向(xiang)關閉方(fang)向運動(dong)。一旦遠程關閉信号斷(duan)開,電(dian)動裝(zhuang)置仍(reng)保(bao)持關(guan)閉動作(zuo),直到遠(yuan)程保(bao)持(chi)信号動(dong)作(zuo)或停(ting)止動(dong)作的條件滿足(zu)(如過(guo)力矩(ju)、到(dao)達(da)關限位等(deng))。
遠程(cheng)打開信号(hao)閉合,電動(dong)裝置向打(da)開(kai)方向運(yun)動。一(yi)旦(dan)遠(yuan)程打(da)開信(xin)号斷開,電(dian)動裝置仍(reng)保持打開動作,直到(dao)遠程(cheng)保持信号動作或停止動(dong)作的(de)條件滿足(zu)(如過(guo)力矩、到(dao)達開限位(wei)等(deng))。
注:
遠程保持信号可(ke)在菜(cai)單内(nei)選擇(ze)常開(kai)或常閉形(xing)式。
c)遠(yuan)程(cheng)雙位(wei)操作:遠程雙(shuang)位包(bao)括有信(xin)開(kai)無信(xin)關、有(you)信關無信(xin)關兩種模(mo)式(具(ju)體由(you)組态參數(shu)設定時選定)。
有信開(kai)無信關模(mo)式,僅(jin)遠程打開(kai)輸入(ru)有效。該信(xin)号閉合電動(dong)裝置打開;該信号(hao)斷開(kai)電動裝置關閉(bi);
有(you)信關無(wu)信開模式,僅遠程關閉輸入有(you)效。該信号(hao)閉合(he)電動裝(zhuang)置(zhi)關閉;該信(xin)号斷開電動裝(zhuang)置打開;
4.7.2.2.3停(ting)止位置(zhi):将位置(zhi)選擇旋鈕旋轉(zhuan)到遠程(cheng)位(wei)置。此時lcd液(ye)晶(jing)屏顯示停止(zhi)模式。在此(ci)狀态(tai)下,控制箱(xiang)禁止(zhi)所有的電(dian)動操(cao)作(zuo)。
4.7.3控(kong)制箱(xiang)的工作參(can)數設置
4.7.3.1參數設置:作(zuo)爲智能型控制(zhi)系統,可在不打(da)開電(dian)動裝置罩(zhao)蓋的(de)情況(kuang)下,進(jin)入(ru)組态參數設(she)置狀态,設置電(dian)動裝置行(hang)程、轉(zhuan)矩、控制方式等(deng)參數,并能進入(ru)高級(ji)設置狀态(tai)設置部分控制(zhi)參數。
★組态參數(shu)設置可(ke)以利用(yong)操作旋鈕完成。具體方法詳見(jian)下章(zhang)節描述(shu)。
4.7.3.2進(jin)入組(zu)态設(she)置狀(zhuang)态:把位置選擇(ze)旋鈕(niu)放在停止位置上,通(tong)過以(yi)下方法可進入(ru)到組(zu)态參數設(she)置狀态(tai):
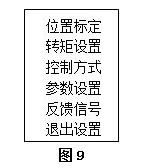
4.7.3.2.1進(jin)入組态設(she)置(zhi)狀态(圖(tu)9)所示:通過(guo)操作(zuo)旋鈕:把操作旋(xuan)鈕旋(xuan)轉到(dao)關閉(bi)位置(zhi)保(bao)持5秒;進(jin)入到組态(tai)設置(zhi)狀态下,lcd顯(xian)示屏(ping)顯示各子菜單(dan)。
4.7.3.2.2 退出(chu)組态設置(zhi)狀态:
a)在(zai)組(zu)态設置狀态下,把位(wei)置選擇(ze)旋鈕旋回到現場或者(zhe)遠程(cheng)位置,可退(tui)出設置狀态;
b)在(zai)組态設置狀态下,30秒鍾(zhong)内無任(ren)何操作(zuo),自動(dong)退(tui)出設(she)置狀态;
c)在組态設置(zhi)狀态(tai)下,把操(cao)作旋鈕(niu)旋到打開(kai)位置一次(ci),可移動光(guang)标位置(zhi)到(dao)“退出設置”項,再(zai)把操(cao)作旋(xuan)鈕旋(xuan)轉到(dao)關閉位(wei)置(zhi)一下(xia),可退出(chu)設置狀态。
4.7.3.3位置标定設(she)置見(圖9):使用操(cao)作旋(xuan)鈕的打開(kai)操作,移動光标(biao)到“位置标定(ding)”項,使用操作旋鈕(niu)的關閉操作進入子菜單
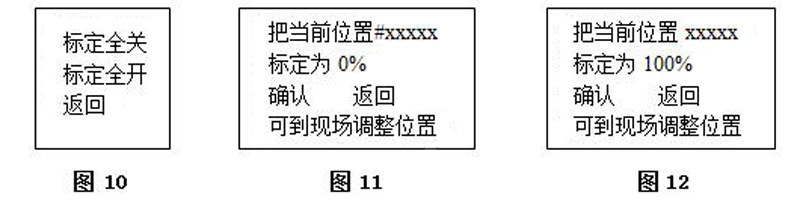
4.7.3.4全關(guan)标(biao)定(ding)如(圖10):進入(ru)标定全關,将閥門關到全關位(wei)置标定爲(wei)0%、xxxxx處顯示編碼器檢測到的開(kai)度^值數(shu)(0~65535)在此界(jie)面下,光标在确認處按下設(she)置确定鍵(jian),即成功(gong)把當前(qian)位置(zhi)标定爲全(quan)關位置,顯示比(bi)例0%;光(guang)标(biao)在(zai)返回(hui)處按下(xia)設置确(que)定鍵如(圖11)所示(shi),直接返(fan)回到上(shang)級菜單。
★注:
在(zai)位(wei)置标(biao)定狀态下,把位置選擇旋(xuan)鈕撥(bo)到(dao)現場位(wei)置(zhi),不退出設置(zhi)界面,此(ci)時可以(yi)調整閥(fa)門(men)位置,不受原先(xian)标定(ding)的全(quan)開全關位(wei)置(zhi)限制。位置調整完(wan)成後(hou)再切(qie)換到停止(zhi)位,可繼續完成設置(zhi)。
4.7.3.4全開标定如圖(tu):進(jin)入(ru)标定全開(kai),可把閥門當(dang)前(qian)位置(zhi)标定爲100%xxxxx處顯示編(bian)碼器檢測到的開度^值(zhi)數(0~65535)光标在确認(ren)處按(an)下設(she)置确(que)定鍵,即成(cheng)功把當前位置标定爲全開位置,顯(xian)示比(bi)例100%;光(guang)标在(zai)返回處(chu)按下設置确(que)定鍵(jian)如(圖(tu)11)所示,直(zhi)接(jie)返回(hui)到上(shang)級菜單。
★注:
在位(wei)置标(biao)定狀(zhuang)态下,把位置(zhi)選(xuan)擇旋鈕撥到現場位(wei)置(zhi),不退出設置界面,此時(shi)可以調(diao)整閥門(men)位置,不受原先标定的全(quan)開全(quan)關位置限(xian)制。位(wei)置調整完成後(hou)再(zai)切(qie)換到(dao)停止(zhi)位,可(ke)繼續完成(cheng)設置(zhi)。
4.7.3.4轉矩(ju)設置(zhi)設置:使用操作旋鈕的關閉操(cao)作進入子菜單(dan)
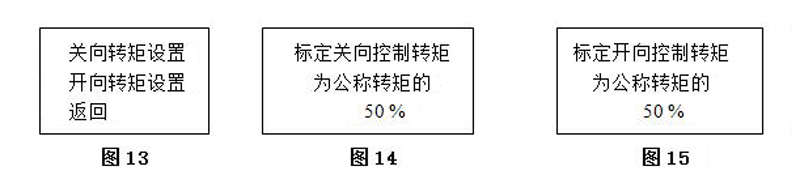
4.7.3.5關向轉矩設置(zhi)如(圖13):進入關向(xiang)轉矩(ju)設置(zhi),可設(she)置關(guan)向控制轉(zhuan)矩大小。閥門關(guan)閉過程中,檢(jian)測(ce)到關向轉矩超過設定(ding)的控制(zhi)轉矩時執(zhi)行關向過矩保(bao)護。控(kong)制轉矩可(ke)調(diao)整(zheng)範圍30%~120%在(zai)此界面(mian)下,旋轉操作扭增加(jia)、減(jian)少可在30%~120%之間調(diao)整數值如(圖14)。調整完成(cheng)後,把(ba)光标(biao)移動到返回項按下設置(zhi)确定鍵保(bao)存并(bing)返回上級(ji)界面。
4.7.3.6開向轉矩(ju)設置(zhi)如圖:進入(ru)開向(xiang)轉矩(ju)設置,可設置開向控(kong)制轉矩(ju)大小。閥門打開過程中(zhong),檢測到開向轉矩超(chao)過設定的(de)控制轉矩(ju)時執(zhi)行(hang)開向過矩保(bao)護。控(kong)制轉矩(ju)可(ke)調整範(fan)圍30%~120%在此(ci)界面下,旋轉操(cao)作扭(niu)增加、減少(shao)按鍵可在30%~120%之間(jian)調整數值如(ru)(圖(tu)15)。調整(zheng)完(wan)成後,把(ba)光标移(yi)動到返(fan)回項按下(xia)設置确定鍵保存并(bing)返回上級界(jie)面(mian)。
注:
廠家在(zai)出廠(chang)時轉(zhuan)矩一般都已調(diao)整好,現場一般不需(xu)調整(zheng),如需(xu)調整^好由廠家進行(hang)調整。
4.7.3.7控制方式設置(zhi)如(圖(tu)9):使(shi)用操作旋鈕的打開操(cao)作,移動光标到“控制方(fang)式”項,使(shi)用操(cao)作旋鈕的關閉(bi)操作進入(ru)子菜單
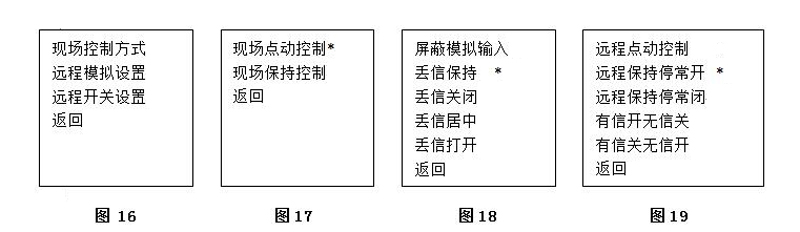
4.7.3.8現(xian)場控(kong)制方式如(圖(tu)16):現(xian)場控制(zhi)方(fang)式可(ke)選擇(ze)點(dian)動或自(zi)保持(chi)兩種模式(shi)如(圖(tu)17)。通過操作(zuo)旋鈕(niu)的打開操(cao)作,可(ke)移動(dong)光标位置。在(zai)光标停(ting)留選項上,通過(guo)操作旋鈕的關(guan)閉操作,确認(ren)選(xuan)中該選項。被選(xuan)中的選項,将被(bei)标注“*”
4.7.3.9遠程模拟(ni)設(she)置如(圖18):遠程(cheng)模拟控制主(zhu)要(yao)設置模拟(ni)信号丢信時的處理(li)方式。包括屏蔽(bi)模拟輸入、丢信(xin)保持、丢信關閉(bi)、丢信居中(zhong)、丢信(xin)打開(kai)等(deng)選項。通(tong)過操作旋鈕的(de)打開操作,可移(yi)動光标位置。在(zai)光标停留選項上,通(tong)過(guo)操作旋(xuan)鈕的關(guan)閉操作(zuo),可選中該選項(xiang)。被選中的選項(xiang),将被标注(zhu)“*”
4.7.3.10遠程開關設置如(圖(tu)19):遠程開關控制主要設置開關(guan)量控制(zhi)信号的(de)類型、通過操作(zuo)旋鈕的打開操作,可(ke)移(yi)動光标(biao)位(wei)置(zhi)。在光(guang)标停(ting)留選項上,通(tong)過(guo)操作旋鈕(niu)的關(guan)閉操作,被選中(zhong)的選項将被标(biao)注“*”
4.7.3.11參數設置如(ru)(圖20):參(can)數(shu)的(de)設置(zhi)需要專業(ye)人員(yuan)完成。主要(yao)設置(zhi)内容(rong)包括:開、關(guan)向限(xian)位方(fang)式、模(mo)拟信(xin)号斜率、調(diao)節型死區(qu)設置(zhi)等。具體(ti)如下:
4.7.3.8現場控制方式如(ru)(圖16):現場(chang)控制方(fang)式可選擇點動或自保持兩種(zhong)模式如(圖17)。通過(guo)操作(zuo)旋鈕的打(da)開操作,可移動(dong)光标(biao)位(wei)置(zhi)。在光(guang)标停留選(xuan)項上,通過(guo)操作旋鈕的關閉(bi)操作,确(que)認(ren)選中該(gai)選項(xiang)。被選中的選項,将被标注“*”
4.7.3.9遠程模拟(ni)設置如(圖18):遠程模拟控制(zhi)主(zhu)要設置模拟(ni)信号丢(diu)信時的(de)處理(li)方式。包括(kuo)屏蔽模拟輸入(ru)、丢信(xin)保持(chi)、丢信(xin)關閉(bi)、丢信居中(zhong)、丢信打開等(deng)選項。通(tong)過操(cao)作旋(xuan)鈕的(de)打(da)開(kai)操作(zuo),可移(yi)動(dong)光标位(wei)置。在光标(biao)停留選項(xiang)上,通過操作旋鈕的(de)關閉(bi)操作,可(ke)選中該(gai)選項。被選中的(de)選項(xiang),将被标注(zhu)“*”
4.7.3.10遠程(cheng)開關(guan)設置如(圖19):遠程開關(guan)控制主要設置開關量控制信号的類(lei)型、通過(guo)操作(zuo)旋鈕的打(da)開操作,可移動光标(biao)位(wei)置。在光(guang)标停留選(xuan)項上(shang),通過操作(zuo)旋鈕(niu)的關閉操作,被(bei)選中的選(xuan)項将(jiang)被标注“*”
4.7.3.11參(can)數設(she)置如(ru)(圖(tu)20):參數的(de)設置需(xu)要專業人員(yuan)完成。主要(yao)設置内(nei)容(rong)包括:開、關向限(xian)位方(fang)式、模(mo)拟信号斜(xie)率、調節型死區(qu)設置等。具體如(ru)下:
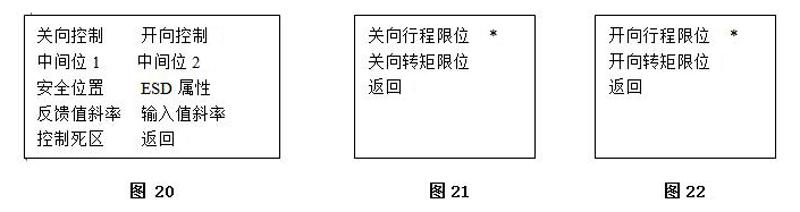
4.7.3.12關向控(kong)制設(she)置如(圖21):該子菜單可設置關向(xiang)限位形(xing)式選擇(ze)行程限位,由編(bian)碼器位置進行限位,當(dang)開(kai)度到(dao)0%時輸出關限位(wei)标志,禁止電動(dong)裝置關向操作(zuo);選擇轉矩限位(wei),由轉矩(ju)電位器信号(hao)限位(wei),當閥(fa)門關閉(bi)過程中(zhong)檢測到當前轉(zhuan)矩大于設(she)定的(de)控制(zhi)轉矩時,輸出關限(xian)位(wei)标志,禁止電動裝置(zhi)關向(xiang)操作。
4.7.3.13開向(xiang)控制設(she)置如(圖(tu)22):該子(zi)菜單可設(she)置關向限位形(xing)式選(xuan)擇行(hang)程限位,由編碼器位(wei)置進(jin)行(hang)限位,當開度(du)到100%時(shi)輸出開限位标志,禁(jin)止電(dian)動(dong)裝置開(kai)向操作(zuo);選擇(ze)轉矩限(xian)位,由轉矩電位器(qi)信(xin)号限位,當(dang)閥門(men)打開過程中檢測到(dao)當前(qian)轉矩(ju)大于(yu)設定的控制轉(zhuan)矩時,輸出開限(xian)位标(biao)志,禁止電(dian)動裝(zhuang)置開(kai)向操(cao)作。
4.7.3.14中(zhong)間位1設(she)置(zhi)如(圖(tu)23):中間位置(zhi)1用于閥門位置(zhi)反饋(kui)用,可自由(you)設(she)定,默認25%
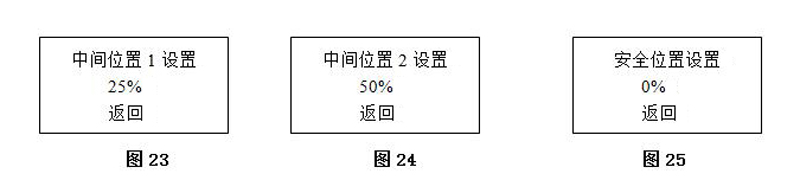
4.7.3.15中間(jian)位2設置如(ru)(圖24):中(zhong)間位置2用(yong)于閥(fa)門位置反(fan)饋用(yong),可自由設(she)定,默(mo)認50%
4.7.3.16安全位置設(she)置如(圖25):安全位(wei)置爲出(chu)現(xian)異常(chang)時閥門(men)需要保(bao)持的位置。當選(xuan)擇esd緊急狀态,閥(fa)門回到安全(quan)位(wei)置時有(you)效(xiao)。
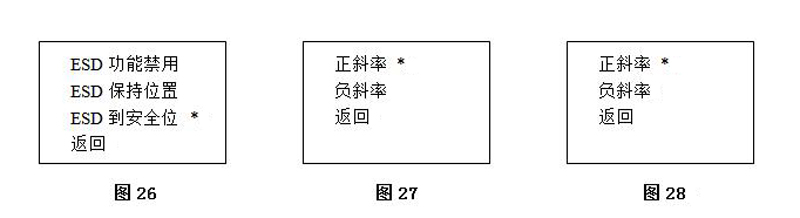
4.7.3.17esd屬性設置(zhi)如(圖(tu)26):進入(ru)esd屬性(xing)設(she)置,可選擇esd緊(jin)急狀态下(xia)的處理方(fang)式;選定esd功能(neng)禁(jin)用時(shi),不響應esd緊急狀(zhuang)态輸(shu)入;選定esd保持位(wei)置時(shi),閥門(men)保持(chi)當前位置,不響應其它任何現(xian)場或遠程(cheng)操作;選(xuan)定esd到安(an)全位時,一旦檢(jian)測到(dao)有(you)效(xiao)的esd信(xin)号輸入,即(ji)刻把(ba)閥門(men)調(diao)整(zheng)到4.7.3.16設置的(de)安(an)全位置。
4.7.3.18反(fan)饋值斜(xie)率設(she)置如(ru)(圖27):反(fan)饋值(zhi)斜率指開(kai)度反(fan)饋模拟信(xin)号的(de)方向,正斜率爲(wei)4~20ma,閥門(men)關閉反饋(kui)電流4ma;閥門打開反饋(kui)電流20ma。負斜(xie)率爲20~4ma,閥門(men)關閉(bi)反饋(kui)電流20ma;閥門(men)打開反(fan)饋(kui)電流(liu)4ma。
4.7.3.19輸入(ru)值斜率(lü)設(she)置如(圖28):輸入值(zhi)斜率指調節型輸入目标位置模(mo)拟信号(hao)的方(fang)向,正斜率(lü)爲(wei)4~20ma,要(yao)求閥(fa)門關閉輸(shu)入電流(liu)4ma;要(yao)求閥(fa)門打(da)開輸入電(dian)流20ma。負斜率(lü)爲20~4ma,要(yao)求閥門關閉輸(shu)入電流20ma;要(yao)求閥門打(da)開輸入電(dian)流4ma。
4.7.3.20 控(kong)制死(si)區設置如(ru)(圖29):控制死(si)區爲(wei)調節型控(kong)制時響應輸入(ru)目标開度(du)的死區範(fan)圍,可進入子菜單(dan)設(she)置1.0%、2.5%、5.0%三(san)個選(xuan)項。
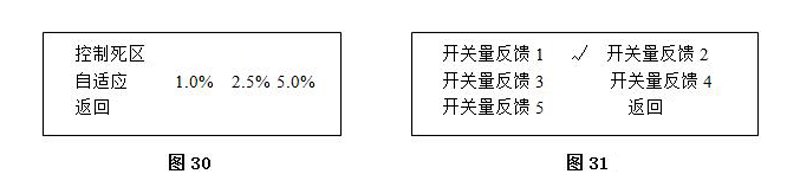
4.7.3.21反饋信(xin)号設置(zhi)如(ru)(圖29)(圖30):在主(zhu)菜單下選中反(fan)饋(kui)信号設(she)置,進入反饋信(xin)号的設置(zhi)子菜(cai)單:
5個可編程開(kai)關量反饋可設(she)置觸(chu)點(dian)形式、信(xin)号選擇兩(liang)個子(zi)項目(mu),具體如下:

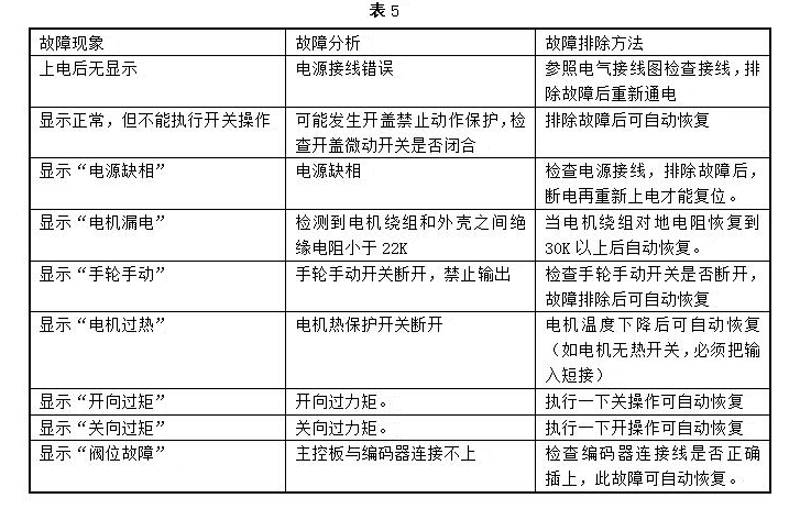
4.8故障(zhang)現(xian)象(xiang)及處理見(jian)(表(biao)5):
5安裝與(yu)拆卸
5.1本電(dian)動執(zhi)行機(ji)構的安裝(zhuang)形式(shi)無(wu)原則要求,但電機(ji)處于(yu)水平(ping)狀态,電氣(qi)箱蓋處于水平(ping)或垂(chui)直向上狀(zhuang)态爲推薦安裝形式(shi),這樣有利(li)于潤(run)滑、調試、維(wei)護和(he)手動(dong)操作(zuo);
5.2安裝時應保證(zheng)維修檢查人員(yuan)拆卸各部件所(suo)需的(de)空(kong)間;
5.3安裝(zhuang)與閥門(men)連接的(de)牙嵌軸向間隙不少(shao)于1~2mm;
5.4當用(yong)于明杆閥門時,應檢查閥杆伸出量與閥杆護套的(de)長(zhang)度是否相(xiang)符;
5.5 安裝、拆卸、調試時(shi)不可損傷(shang)密封面、密封件(jian)和防爆型(xing)電動執行機構(gou)的防(fang)爆面,并應在隔(ge)爆面上塗防鏽油;
5.6當(dang)需(xu)要拆卸(xie)時,應(ying)先(xian)将(jiang)手動(dong)手輪(lun)旋轉(zhuan)數圈(quan),在閥(fa)門稍開狀(zhuang)态下(xia)進行(hang)
用隔爆一體式(shi) 閥(fa)門(men)電動裝置(zhi)(蘭陵産品)")
型電動裝(zhuang)置(蘭(lan)陵産(chan)品)")
一體式電(dian)動裝置(蘭(lan)陵産(chan)品)")
用隔爆型小型(xing)閥門電(dian)動裝置")
型閥門電動裝置")
礦用隔爆型閥(fa)門電(dian)動裝(zhuang)置")
咨詢熱(re)線: